A team of researchers at Harvard’s Wyss Institute for Biologically Inspired Engineering has developed a robot that can autonomously drive interlocking steel sheet piles into soil. The vision of fully autonomous or unsupervised construction has long fascinated architects, especially in the context of remote environments or even space habitats. This idea has inspired many researchers in architecture and engineering to explore robot-enabled construction and fabrication techniques. However, so far there hasn’t been a solution for building foundations or otherwise anchoring into the ground, which is a requirement for useful structures. Automating sheet pile driving addresses this need.
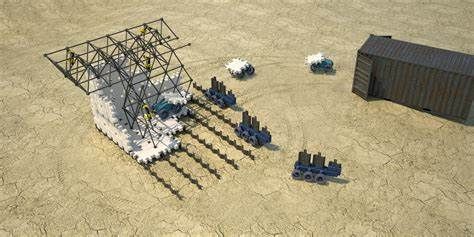
Researchers at the Wyss Institute have developed a robot designed to drive interlocking sheet piles into the ground to help stabilize the soil. Teams of such robots could help combat erosion, restore damaged landscapes, and facilitate sustainable land management in a variety of settings. Credit: Wyss Institute at Harvard University Conventional sheet pile driving processes are extremely energy-intensive. Only a fraction of the weight of typical heavy machinery is used for applying a downward force. The Wyss team’s “Romu” robot, on the other hand, is able to leverage its own weight to drive sheet piles into the ground. The project began as an exploration of methods for automated site preparation and installation of foundations for other robotic systems to build on; as it developed, the team determined that such interventions could also be directly applicable to land restoration tasks in remote environments.

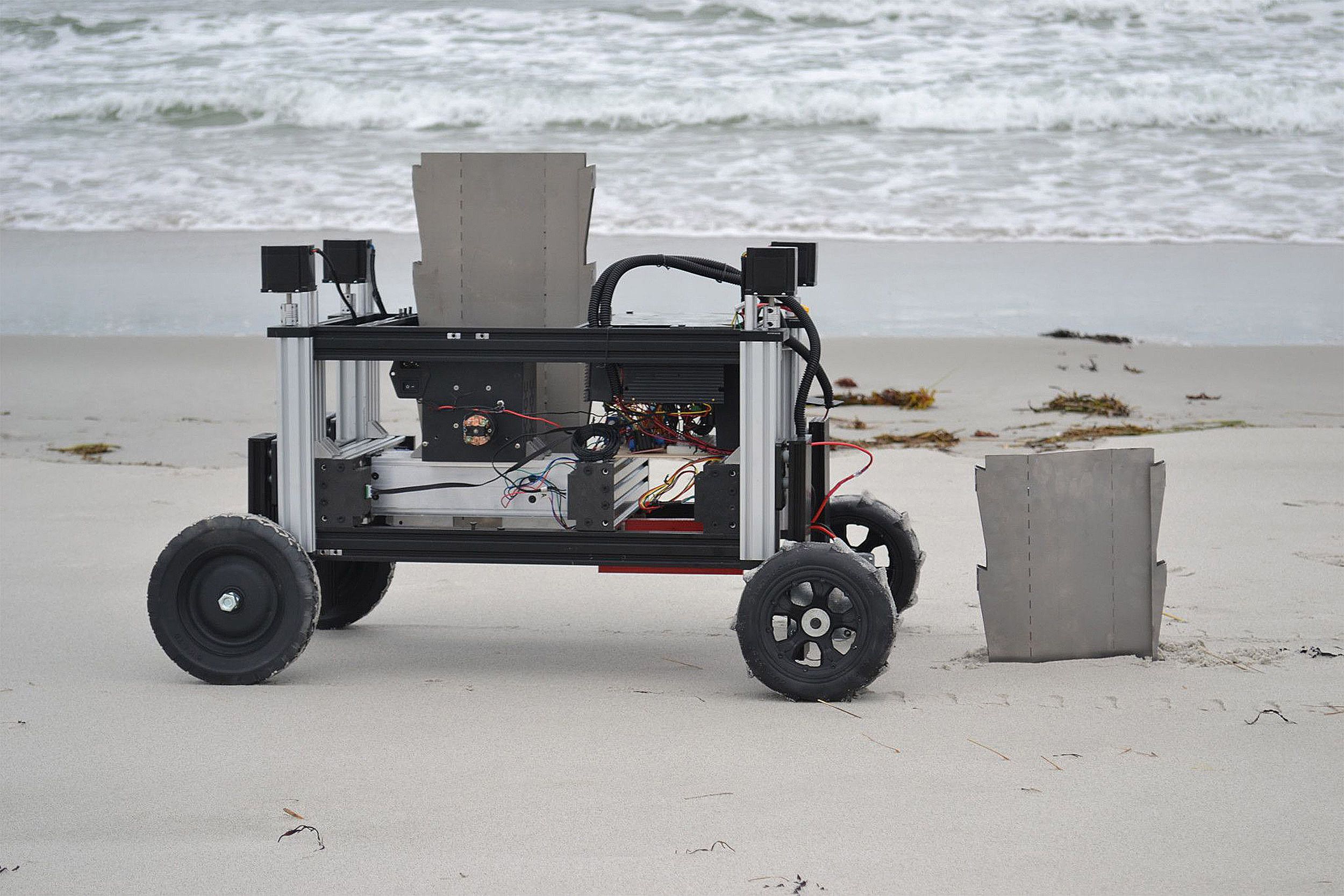
The robot is designed to drive interlocking sheet piles into granular soils like sand on a beach. Credit: Wyss Institute at Harvard University Working with designers from the Department of Landscape Architecture at Harvard University’s Graduate School of Design, the team is looking into broader land management applications. Among the most immediate challenges of our world’s sprawling urbanization is an adaptation to climate change. Mobilizing analytical evaluations at the intersection of ecological processes and patterns of urbanization, the joint research effort develops design strategies aimed at addressing the realities of environmental degradation, increased storm events, and rising sea levels. The team envisions large numbers of Romu robots working together as a collective or swarm, making use of environmental cues to deploy localized interventions. “Shifting away from the inflexible centralized approach of modern planning, robotic swarm intelligence offers strategic and highly adaptive responses over vast urban and agricultural landscapes,” explains Aziz Barbar from the Harvard Graduate School of Design. This shift points towards a coordinated “machine ecology” capable of improving soil stabilization, encouraging biodiversity, countering water scarcity, and fortifying living environments against looming threats of climate change. “The name Terramanus ferromurus (Romu) is a nod to this concept in which autonomous systems can be introduced into natural environments as new participants, taking specific actions to complement and promote human environmental stewardship,” said Nathan Melenbrink from the Wyss Institute. This research may develop into a thematic focus of future coursework at the GSD.
Source: Harvard University